PlantMap – Ein digitales Logbuch zum Monitoring von Mikrofarming
Software-Engineering-Projekt
Studentische Projektleitung:
- Julian Arkenau, Technische Informatik
Projektteam:
- Timo Dobrowolski, Medieninformatik
- Frederik Marahrens, Medieninformatik
- Lucas Siebels, Medieninformatik
- Philipp Brozmann, Technische Informatik
- Henrik Schmeink, Technische Informatik
Modul: Software-Engineering-Projekt
Betreuer*in:
- Prof. Dr. Karsten Morisse
- Dr. Sebastian Pütz (DFKI, Nature Robots)
- Gerrit Woeckner (DFKI, Nature Robots)
- Malte Kleine Piening (DFKI, Nature Robots)
- Billie Nuray Ritter (DFKI, Nature Robots)
- Lukas Niehaus (DFKI, Nature Robots)
In Kooperation mit:
- Nature Robots, Osnabrück
- DFKI, Deutsches Forschungszentrum für Künstliche Intelligenz, Osnabrück
Die Landwirtschaft geh?rt mit bis zu einem Drittel der weltweit verursachten Treibhausemissionen zu einem der gr??ten Umweltverschmutzer. Durch Monokulturen und die Verwendung von Pestiziden ist ein erheblicher Rückgang der Biodiversit?t zu verzeichnen.
Dem gegenüber steht das Konzept des Mikrofarmings: Es wird auch als biointensiver Anbau bezeichnet und stellt das gesamte ?kosystem in den Vordergrund. Bodenfruchtbarkeit, Regeneration und Erhalt des ?kosystems sind ma?gebende Prinzipien. Dabei werden bis zu fünfzig verschiedene Gemüsesorten in schmalen Kultur-Streifen eng nebeneinander kultiviert.
Der Einstieg in das Anbaukonzept ist jedoch mit zahlreichen Hürden verbunden. Es wird viel Fachwissen zum Anbau ben?tigt, sodass der Zugang für Neueinsteiger*innen und Umsteiger*innen aus der konventionellen Landwirtschaft erschwert wird. Zudem existieren kaum Tools und Maschinen für die regenerative Landwirtschaft.
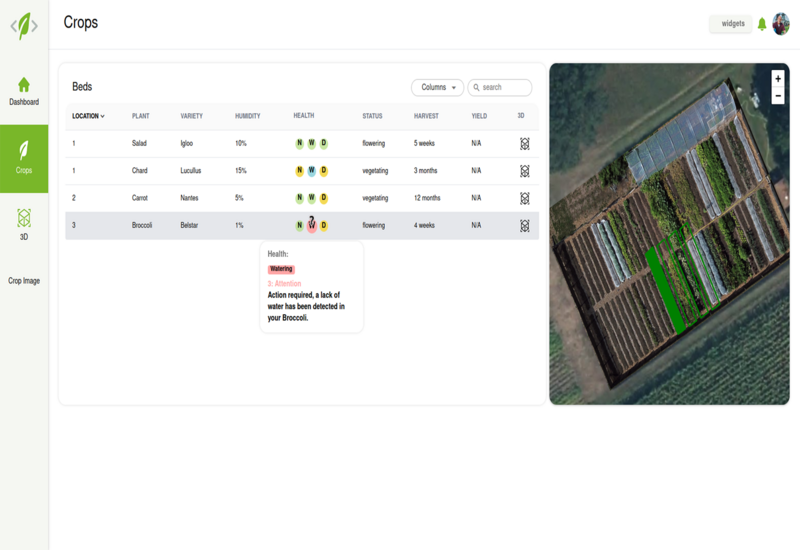
Das Ziel von Nature Robots ist die F?rderung von ?kologischer und insbesondere kleinteiliger Landwirtschaft durch Robotik und Künstliche Intelligenz (KI). Das Ziel des Software-Engineering-Projektes war dabei die Entwicklung eines Demonstrators zur Unterstützung von G?rtner*innen im biointensiven Gemüseanbau. Die von dem Roboter (Lero) aufgenommenen und in einer semantischen Umgebungsrepr?sentation gespeicherten Daten werden dazu in einer Weboberfl?che nutzbar gemacht. Die Unterstützung erfolgt dabei durch eine ?bersicht der im Garten vorhanden Pflanzen sowie deren Zustand. Au?erdem werden Handlungsempfehlungen, Erntezeitpunkte und eine 3D-Ansicht der Pflanzen angeboten.
Projektbilder




Projektvideo
